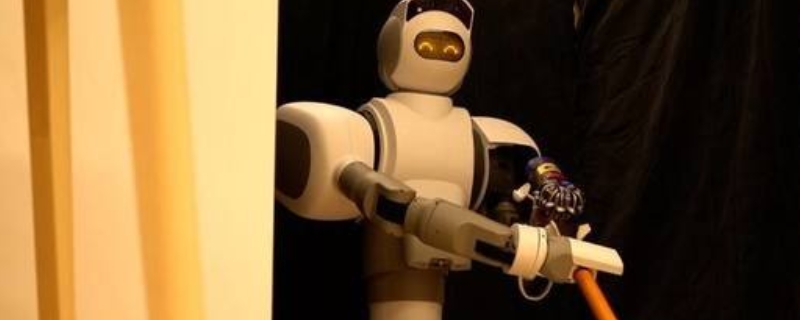
类似人的智能机器人属于第三代。第一代的机器人是示教再现机器,就是运行编程者事先已经编好的程序,无论外界环境怎么样改变,都不会改变动作,例如机械臂。第二代的机器人是带传感器的机器人,能对外界环境的改变做出一定的自身调整,例如扫地机器人。第三代机器人是智能机器人,它是利用各种传感器、测量器等来获取环境信息,然后利用智能技术进行识别、理解、推理最后作出规划决策,能自主行动实现预定目标的高级机器人。
智能机器人(第三代):这是指具有类似于人的智能的机器人,即它具有感知环境的能力,配备有视觉、听觉、触觉、嗅觉等感觉器官,能从外部环境中获取有关信息,具有思维能力,能对感知到的信息进行处理,以控制自己的行为,具有作用于环境的行为能力,能通过传动机构使自己的“手”、“脚"等肢体行动起来,正确、灵巧地执行思维机构下达的命令。

程序控制机器人(第一代):第一代机器人是程序控制机器人,它完全按照事先装入到机器人存储器中的程序安排的步骤进行工作。程序的生成及装人有两种方式,一种是由人根据工作流程编制程序并将它输人到机器人的存储器中;另一种是“示教-再现”方式,所谓“示教”是指在机器人第一次执行任务之前,由人引导机器人去执行操作,即教机器人去做应做的工作,机器人将其所有动作一步步地记录下来,并将每一步表示为一条指令,示教结束后机器人通过执行这些指令以同样的方式和步骤完成同样的工作(即再现)。如果任务或环境发生了变化,则要重新进行程序设计。这一代机器人能成功地模拟人的运动功能,它们会拿取和安放、会拆卸和安装、会翻转和抖动,能尽心尽职地看管机床、熔炉、焊机、生产线等,能有效地从事安装、搬运、包装、机械加工等工作。目前国际上商品化、实用化的机器人大都属于这一类。这一代机器人的最大缺点是它只能刻板地完成程序规定的动作,不能适应变化了的情况,—旦环境情况略有变化(如装配线上的物品略有倾斜),就会出现问题。更糟糕的是它会对现场的人员造成危害,由于它没有感觉功能,有时会出现机器人伤人的情况。日本就曾经出现机器人把现场的一个工人抓起来塞到刀具下面的情况。
自适应机器人(第二代):第二代机器人的主要标志是自身配备有相应的感觉传感器,如视觉传感器、触觉传感器、听觉传感器等,并用计算机对其进行控制。这种机器人通过传感器获取作业环境、操作对象的简单信息,然后由计算机对获得的信息进行分析、处理、控制机器人的动作。由于它能随着环境的变化而改变自己的行为,故称为自适应机器人。目前,这一代机器人也已进人商品化阶段,主要从事焊接、装配、搬运等工作。第二代机器人虽然具有一些初级的智能,但还没有达到完全“自治”的程度,有时也称这类机器人为人_眼协调型机器人。